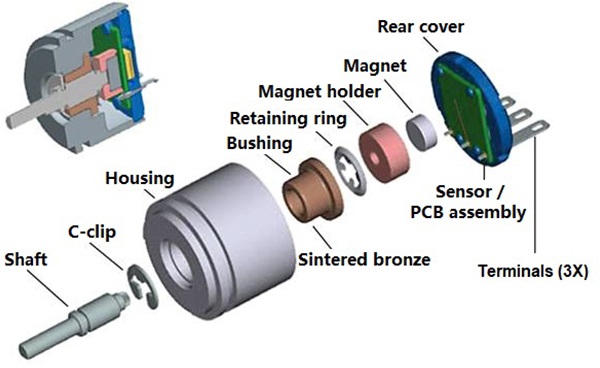
Ako imate priliku da rastavite magnetni rotacijski enkoder, obično ćete vidjeti unutrašnju strukturu poput one prikazane iznad. Magnetni enkoder se sastoji od mehaničke osovine, strukture školjke, sklopa PCB-a na kraju enkodera i malogdisk magnetrotirajući sa osovinom na kraju mehaničke osovine.
Kako magnetni enkoder mjeri povratnu informaciju o položaju rotacije?
Hallov efekat: stvaranje razlike potencijala kroz vodič kroz koji teče električna struja kada se magnetsko polje primjenjuje u smjeru okomitom na smjer struje koja teče.
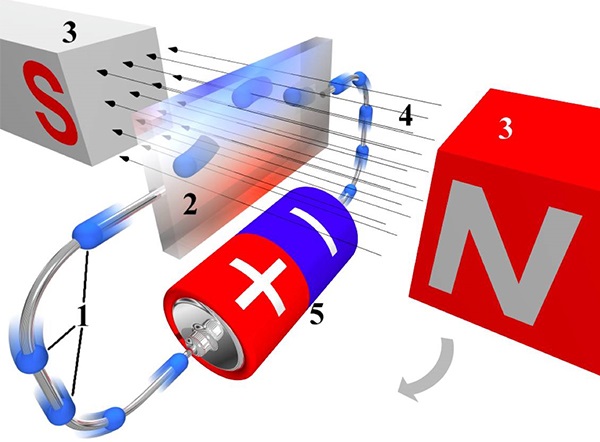
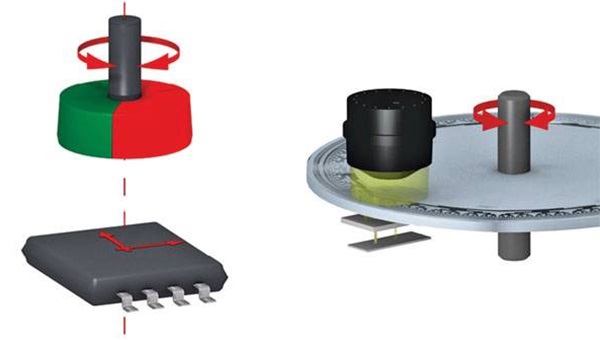
Ako se magnetsko polje primijenjeno na provodnik rotira u smjeru prikazanom strelicom iznad s putanjom strujanja kao osom, Hallova potencijalna razlika će se promijeniti zbog promjene ugla između magnetnog polja i provodnika, a trend promjene potencijalne razlike je sinusoidna kriva. Stoga, na osnovu napona na obje strane provodnika pod naponom, kut rotacije magnetnog polja može se izračunati obrnuto. Ovo je osnovni mehanizam rada magnetnog enkodera pri mjerenju povratne informacije o položaju rotacije.
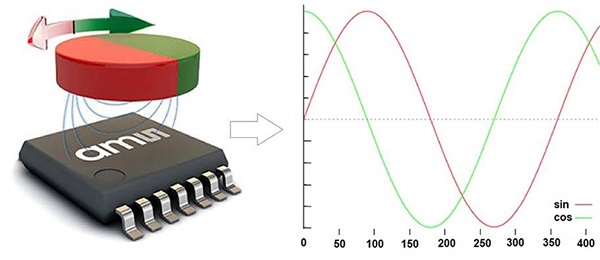
Slično principu da rezolver koristi dva seta međusobno okomitih izlaznih zavojnica, dva (ili dva para) hala indukciona elementa sa međusobno okomitim smjerovima struje također su potrebna u magnetskom enkoderu kako bi se osigurala jedinstvena korespondencija između rotacionog položaja magnetskog polja i izlazni napon (kombinacija).
Danas, Hallovi senzori (čipovi) koji se koriste u magnetnim enkoderima općenito imaju visok stupanj integracije, koji ne samo da integrira Holove poluvodičke komponente i povezane krugove za obradu i regulaciju signala, već također integrira različite vrste izlaznih modula signala, kao što su sinusni i kosinusni analogni. signali, kvadratni talasni digitalni signali nivoa ili izlazne jedinice sabirnice.
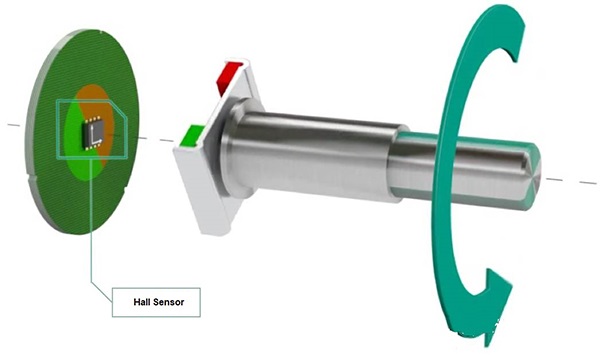
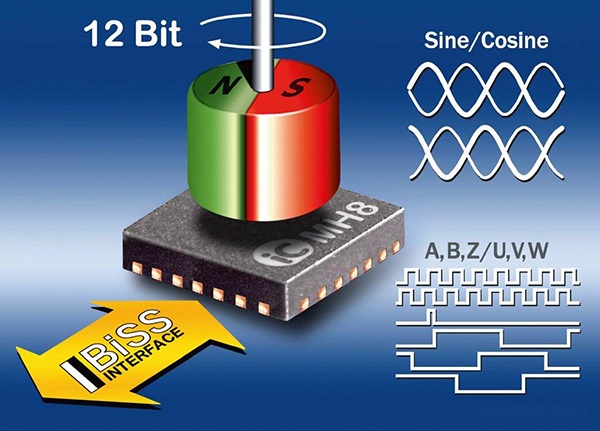
Na ovaj način, instalirajte trajni magnet poput sinteriranog neodimijumskog magneta koji stvara magnetno polje na kraju rotirajuće osovine enkodera, postavite gore spomenuti čip Holovog senzora na PCB ploču i približite se trajnom magnetu na kraju enkodera osovina prema određenim zahtjevima (smjer i udaljenost).
Analizom izlaznog naponskog signala iz Holovog senzora preko štampane ploče, može se identifikovati rotirajući položaj rotora enkodera.
Struktura i princip rada magnetnog kodiranja određuju posebne zahtjeve u vezi sa ovim permanentnim magnetom, na primjer magnetni materijal, oblik magneta, smjer magnetizacije, itd.dijametralno magnetizirani neodimijski magnetdisk je najbolja opcija magneta. Ningbo Horizon Magnetics ima iskustvo u isporuci mnogih proizvođača magnetnih kodova sa nekim veličinamadijametralni neodimijumski disk magneti, D6x2.5mm i D10x2.5mm dijametralni disk Neodimijski magneti od kojih su najpopularniji modeli.
Može se vidjeti da u poređenju sa tradicionalnim optičkim enkoderom, magnetnom enkoderu nije potreban složen kodni disk i izvor svjetlosti, broj komponenti je manji, a struktura detekcije je jednostavnija. Štoviše, sam Hall element također ima mnoge prednosti, kao što su čvrsta struktura, mala veličina, mala težina, dug radni vijek, otpornost na vibracije, ne boji se prašine, ulja, vodene pare i slane magle, odnosno korozije.
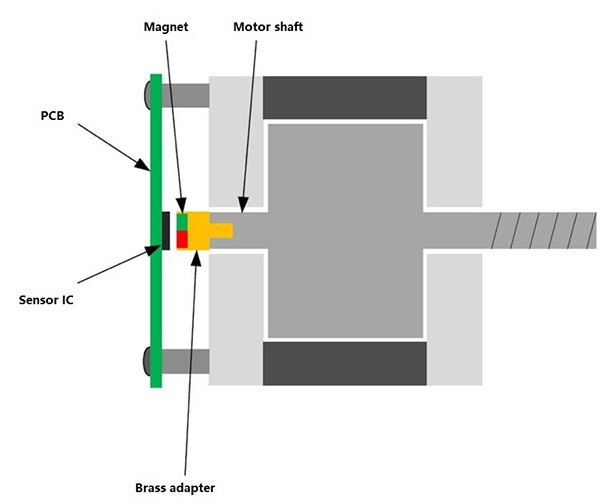
Kada se tehnologija magnetnog enkodera primjenjuje na povratnu informaciju o položaju rotacije elektromotora,sinterirani NdFeB magnetni cilindarmagnetnog enkodera može se direktno ugraditi na kraj osovine motora. Na taj način može eliminirati prijelazni ležaj (ili spojnicu) potreban kada se koristi tradicionalni enkoder s povratnom spregom i postići beskontaktno mjerenje položaja, što smanjuje rizik od kvara enkodera (ili čak i oštećenja) zbog vibracija mehaničke osovine tokom rad elektromotora. Stoga pomaže poboljšanju stabilnosti rada elektromotora.
Vrijeme objave: Jul-21-2022