Sa snažnim razvojem elektronske industrije, detekcija položaja nekih strukturnih komponenti polako se menja od prvobitnog kontaktnog merenja do merenja bez kontakta krozHolov senzor položaja i magnet. Kako možemo odabrati odgovarajući magnet prema našim proizvodima i strukturi? Ovdje radimo jednostavnu analizu.
Prvo moramo odrediti materijal magneta. Trenutno, samarij kobalt magnet i neodimijum gvožđe bor se široko koriste u senzorima položaja Hola. Glavna razlika između dva magneta je u tome što su na osnovu iste zapremine NdFeB magneti jači od magneta od samarijum kobalta; termalni izlet samarijum kobalta manji je od Nd-Fe-B; otpornost na oksidaciju samarijuma kobalta je jača od otpora Nd-Fe-B, ali općenito postoji premaz na vanjskoj strani magneta, koji može riješiti problem oksidacije; magnet od samarijum kobalta ima bolju temperaturnu otpornost od magneta NdFeB, ali vrijednost temperaturne otpornosti za oba magnetna materijala može doseći više od 200 ℃. Stoga, prilikom odabira tipa magneta, treba ga procijeniti u kombinaciji sa troškovima, radnom temperaturom i radnim okruženjem. Generalno, NdFeB se može više koristiti, uglavnom zato što ima najbolje karakteristike magnetnog polja. Međutim, kada se radi u širokom temperaturnom rasponu, preporučljivo je odabrati magnet od samarijum kobalta zbog njegovog malog termičkog pomaka.
Osim toga, potrebno je odrediti neke osnovne parametre magneta. Prema informacijama o položaju testa i smjeru kretanja objekta, utvrđujemo da li je smjer magnetizacije magneta dijametralan ili aksijalan. Osim toga, određuje se da li će se odabrati akvadratni magnetili acilindrični magnetprema instalacijskoj strukturi. Naravno, ponekad moramo prilagoditi oblik magneta prema strukturi. Postoji još jedan faktor zahtjeva u vezi magnetnog fluksa, koji je oduvijek bio naša briga pri odabiru magneta. U stvari, moramo ga analizirati u sljedeća dva aspekta:
1. Jačina magnetnog polja indukovana samim senzorom položaja Hola i opseg indukovanog magnetnog polja u svakom smeru biće jasno označeni u knjizi podataka senzora.
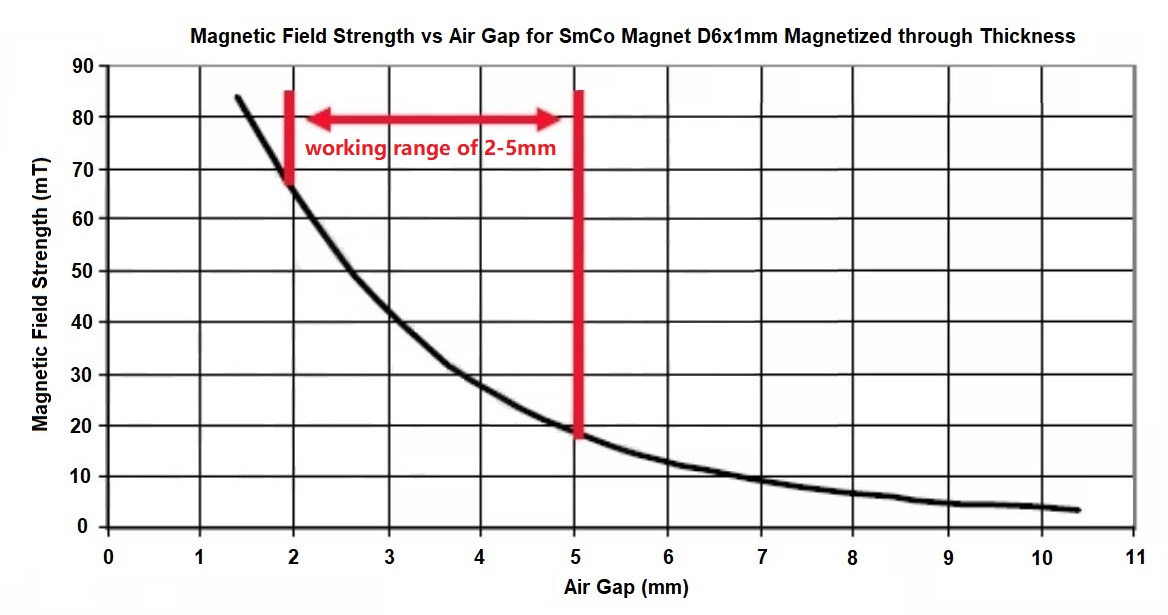
2. Udaljenost između magneta i samog senzora općenito je određena strukturom proizvoda. Prema gornja dva aspekta i krivulji promjene magnetnog polja na donjoj slici kao primjer, možemo odrediti jačinu magnetnog polja potrebnog magneta.
Konačno, moramo shvatiti da to ne znači da sve dok magnetsko polje pada na zahtjeve za raspon senzora, magnet može biti što dalje od senzora. Iako sam senzor ima funkciju kalibracije, moramo razumjeti da kada je magnet predaleko od senzora, distribuciju samog magnetnog polja je teško osigurati linearnost ili blizu linearnosti. To znači da će promjenom položaja i nelinearne distribucije samog magnetnog polja mjerenje senzora postati složeno, a kalibracija će postati vrlo složena, tako da proizvod nema reducibilnost.
Gore navedeno je samo jednostavna analiza odabira magneta u aplikacijama Hall senzora. Nadamo se da će vam biti od pomoći. Ako imate drugih pitanja tokom procesa razvoja, kontaktirajte nas,Ningbo Horizon Magnetics. Možemo uspostaviti dalju komunikaciju i pružiti vam tehničku podršku.
Vrijeme objave: 12.08.2021